



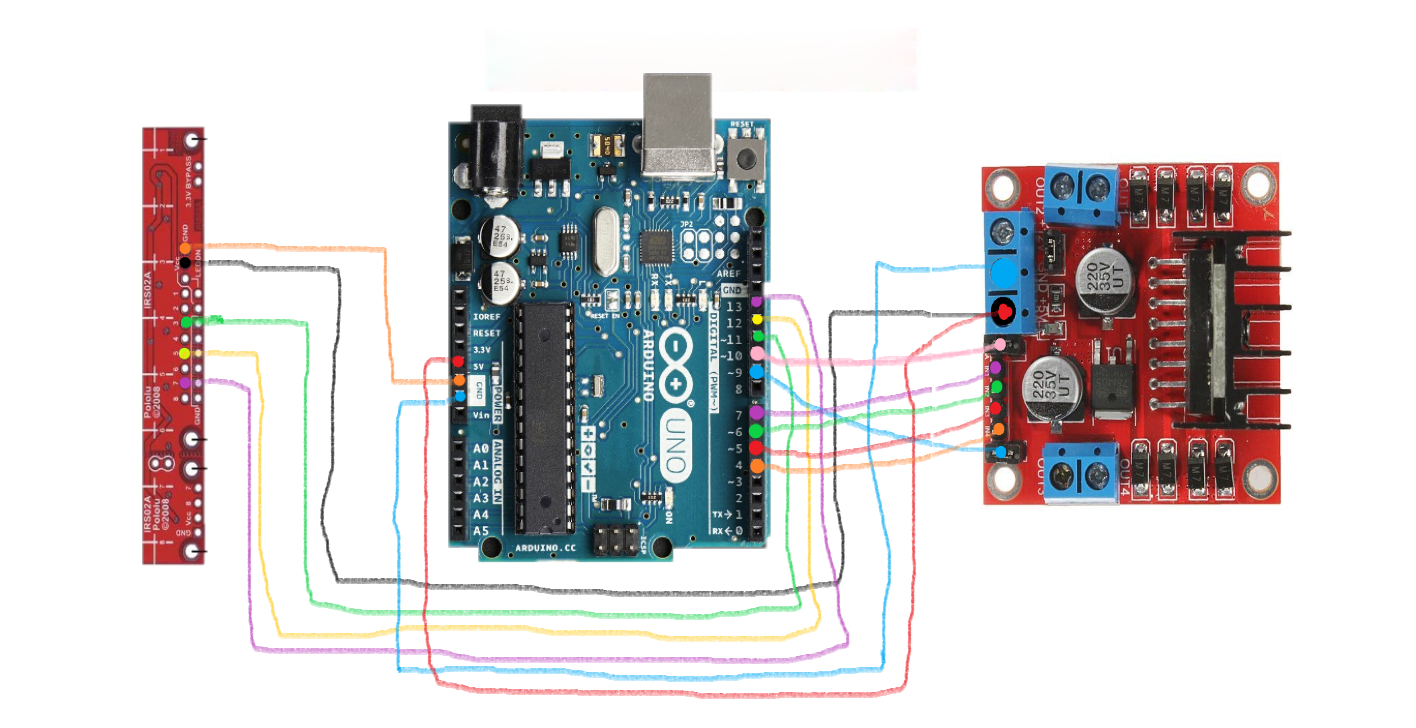
Şekil Şeması:
Kodlar
#include <QTRSensors.h>
#define NUM_SENSORS 7
#define NUM_SAMPLES_PER_SENSOR 4
#define EMITTER_PIN QTR_NO_EMITTER_PIN
QTRSensorsRC qtrrc((unsigned char[]) { 1, 2, 3, 4, 5, 12, 13}, NUM_SENSORS, EMITTER_PIN);
unsigned int sensorValues[NUM_SENSORS];
int ena=10;
int in1=6;
int in2=7;
int enb=11;
int in3=8;
int in4=9;
**** setup()
{
delay(500);
Serial.begin(9600);
delay(1000);
pinMode(ena,OUTPUT);
pinMode(in1,OUTPUT);
pinMode(in2,OUTPUT);
pinMode(enb,OUTPUT);
pinMode(in3,OUTPUT);
pinMode(in4,OUTPUT);
}
**** loop()
{
qtrrc.read(sensorValues);
Serial.print(sensorValues[1]); /* Tüm sensörlerin deÄerlerini ekrana yazdırmak için ayrı ayrı sensör deÄerleri seri port üzerinde ekrana yazdırıyoruz.*/
Serial.print('\t');
Serial.print(sensorValues[2]);
Serial.print('\t');
Serial.print(sensorValues[3]);
Serial.print('\t');
Serial.print(sensorValues[4]);
Serial.print('\t');
Serial.print(sensorValues[5]);
Serial.print('\t');
Serial.print(sensorValues[6]);
Serial.print('\t');
Serial.print(sensorValues[7]);
Serial.print('\t');
Serial.print(sensorValues[8]);
Serial.print('\t');
Serial.println();
if( sensorValues[3] < 250 || sensorValues[4] < 250 )
{
digitalWrite(7,HIGH); //Sol
analogWrite(10,255);
digitalWrite(8,HIGH); //Sag
analogWrite(11,255);
delay(60);
}
else if (sensorValues[1] < 250 || sensorValues[2] < 250)
{
digitalWrite(7,LOW); //Sol
analogWrite(10,255);
digitalWrite(8,HIGH);
analogWrite(11,255);
delay(60);
}
else if (sensorValues[5] < 250 || sensorValues[6] < 250)
{
digitalWrite(7,HIGH);
analogWrite(10,255);
digitalWrite(8,LOW); //Sag
analogWrite(11,255);
delay(60);
}
else
{
digitalWrite(7,LOW); //Sol
analogWrite(10,0);
digitalWrite(8,LOW); //Sag
analogWrite(11,0);
delay(60);
delay(60);
}
}
şekil şeması koda göre nasıl olmalı acaba bilen biri acil yardım gerekli
NOT=PROJENİN KİTİ MOTORLARI TEKERLEKLERİ HERŞEYİ HAZIR VE BİR KİT ÜZERİNE KURULU SADECE NEYİ NEREYE BAĞLAYACAĞIM ONU YAPAMADIM.
Kodlar
#include <QTRSensors.h>
#define NUM_SENSORS 7
#define NUM_SAMPLES_PER_SENSOR 4
#define EMITTER_PIN QTR_NO_EMITTER_PIN
QTRSensorsRC qtrrc((unsigned char[]) { 1, 2, 3, 4, 5, 12, 13}, NUM_SENSORS, EMITTER_PIN);
unsigned int sensorValues[NUM_SENSORS];
int ena=10;
int in1=6;
int in2=7;
int enb=11;
int in3=8;
int in4=9;
**** setup()
{
delay(500);
Serial.begin(9600);
delay(1000);
pinMode(ena,OUTPUT);
pinMode(in1,OUTPUT);
pinMode(in2,OUTPUT);
pinMode(enb,OUTPUT);
pinMode(in3,OUTPUT);
pinMode(in4,OUTPUT);
}
**** loop()
{
qtrrc.read(sensorValues);
Serial.print(sensorValues[1]); /* Tüm sensörlerin deÄerlerini ekrana yazdırmak için ayrı ayrı sensör deÄerleri seri port üzerinde ekrana yazdırıyoruz.*/
Serial.print('\t');
Serial.print(sensorValues[2]);
Serial.print('\t');
Serial.print(sensorValues[3]);
Serial.print('\t');
Serial.print(sensorValues[4]);
Serial.print('\t');
Serial.print(sensorValues[5]);
Serial.print('\t');
Serial.print(sensorValues[6]);
Serial.print('\t');
Serial.print(sensorValues[7]);
Serial.print('\t');
Serial.print(sensorValues[8]);
Serial.print('\t');
Serial.println();
if( sensorValues[3] < 250 || sensorValues[4] < 250 )
{
digitalWrite(7,HIGH); //Sol
analogWrite(10,255);
digitalWrite(8,HIGH); //Sag
analogWrite(11,255);
delay(60);
}
else if (sensorValues[1] < 250 || sensorValues[2] < 250)
{
digitalWrite(7,LOW); //Sol
analogWrite(10,255);
digitalWrite(8,HIGH);
analogWrite(11,255);
delay(60);
}
else if (sensorValues[5] < 250 || sensorValues[6] < 250)
{
digitalWrite(7,HIGH);
analogWrite(10,255);
digitalWrite(8,LOW); //Sag
analogWrite(11,255);
delay(60);
}
else
{
digitalWrite(7,LOW); //Sol
analogWrite(10,0);
digitalWrite(8,LOW); //Sag
analogWrite(11,0);
delay(60);
delay(60);
}
}
şekil şeması koda göre nasıl olmalı acaba bilen biri acil yardım gerekli
NOT=PROJENİN KİTİ MOTORLARI TEKERLEKLERİ HERŞEYİ HAZIR VE BİR KİT ÜZERİNE KURULU SADECE NEYİ NEREYE BAĞLAYACAĞIM ONU YAPAMADIM.
Moderatör tarafında düzenlendi:

